pytorch实现ResNet50模型(小白学习,详细讲解) |
您所在的位置:网站首页 › resnet18 源码 › pytorch实现ResNet50模型(小白学习,详细讲解) |
pytorch实现ResNet50模型(小白学习,详细讲解)
|
参考资料
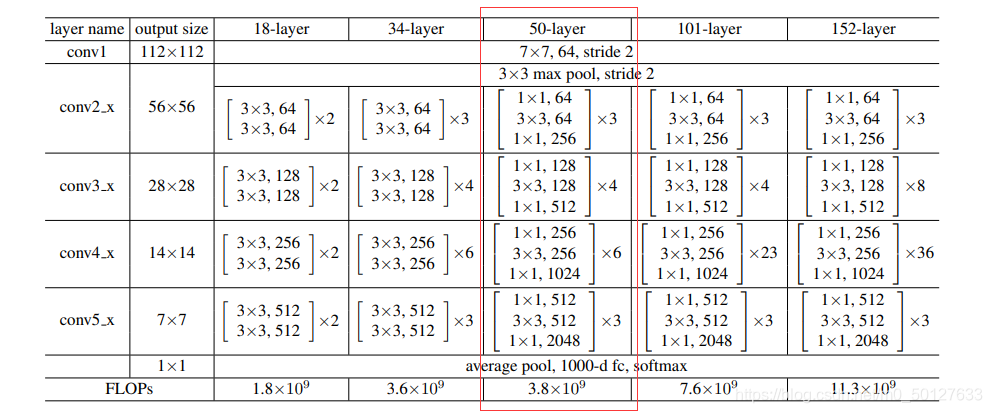
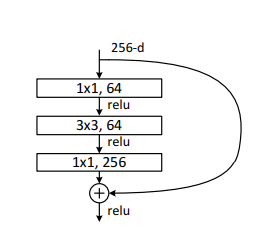
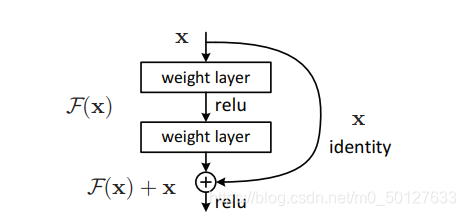
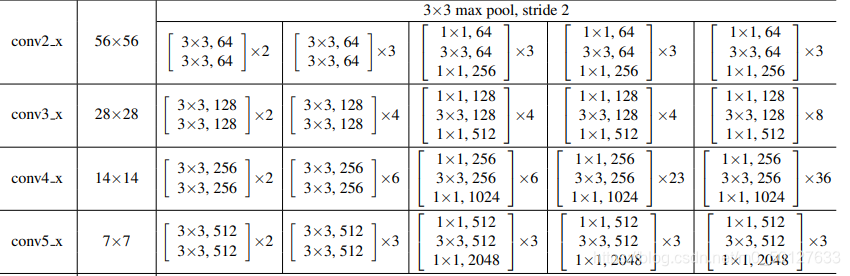
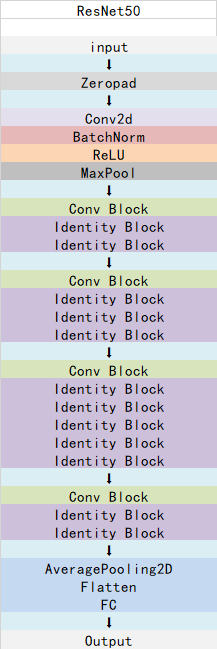
作为新手学习难免会有很多不懂的地方,以下是我参考的一些资料: ResNet源码:https://github.com/pytorch/vision/blob/master/torchvision/models/resnet.py 源码讲解:https://www.jianshu.com/p/ec0967460d08 ResNet论文:https://arxiv.org/pdf/1512.03385.pdf ResNet50复现:https://note.youdao.com/ynoteshare1/index.html?id=5a7dbe1a71713c317062ddeedd97d98e&type=note ResNet50复现讲解:https://www.bilibili.com/video/BV1154y1S7WC?from=search&seid=8328821625196427671 代码实现 import torch from torch import nn class Bottleneck(nn.Module): #每个stage维度中扩展的倍数 extention=4 def __init__(self,inplanes,planes,stride,downsample=None): ''' :param inplanes: 输入block的之前的通道数 :param planes: 在block中间处理的时候的通道数 planes*self.extention:输出的维度 :param stride: :param downsample: ''' super(Bottleneck, self).__init__() self.conv1=nn.Conv2d(inplanes,planes,kernel_size=1,stride=stride,bias=False) self.bn1=nn.BatchNorm2d(planes) self.conv2=nn.Conv2d(planes,planes,kernel_size=3,stride=1,padding=1,bias=False) self.bn2=nn.BatchNorm2d(planes) self.conv3=nn.Conv2d(planes,planes*self.extention,kernel_size=1,stride=1,bias=False) self.bn3=nn.BatchNorm2d(planes*self.extention) self.relu=nn.ReLU(inplace=True) #判断残差有没有卷积 self.downsample=downsample self.stride=stride def forward(self,x): #参差数据 residual=x #卷积操作 out=self.conv1(x) out=self.bn1(out) out=self.relu(out) out=self.conv2(out) out=self.bn2(out) out=self.relu(out) out=self.conv3(out) out=self.bn3(out) out=self.relu(out) #是否直连(如果Indentity blobk就是直连;如果Conv2 Block就需要对残差边就行卷积,改变通道数和size if self.downsample is not None: residual=self.downsample(x) #将残差部分和卷积部分相加 out+=residual out=self.relu(out) return out class ResNet(nn.Module): def __init__(self,block,layers,num_class): #inplane=当前的fm的通道数 self.inplane=64 super(ResNet, self).__init__() #参数 self.block=block self.layers=layers #stem的网络层 self.conv1=nn.Conv2d(3,self.inplane,kernel_size=7,stride=2,padding=3,bias=False) self.bn1=nn.BatchNorm2d(self.inplane) self.relu=nn.ReLU() self.maxpool=nn.MaxPool2d(kernel_size=3,stride=2,padding=1) #64,128,256,512指的是扩大4倍之前的维度,即Identity Block中间的维度 self.stage1=self.make_layer(self.block,64,layers[0],stride=1) self.stage2=self.make_layer(self.block,128,layers[1],stride=2) self.stage3=self.make_layer(self.block,256,layers[2],stride=2) self.stage4=self.make_layer(self.block,512,layers[3],stride=2) #后续的网络 self.avgpool=nn.AvgPool2d(7) self.fc=nn.Linear(512*block.extention,num_class) def forward(self,x): #stem部分:conv+bn+maxpool out=self.conv1(x) out=self.bn1(out) out=self.relu(out) out=self.maxpool(out) #block部分 out=self.stage1(out) out=self.stage2(out) out=self.stage3(out) out=self.stage4(out) #分类 out=self.avgpool(out) out=torch.flatten(out,1) out=self.fc(out) return out def make_layer(self,block,plane,block_num,stride=1): ''' :param block: block模板 :param plane: 每个模块中间运算的维度,一般等于输出维度/4 :param block_num: 重复次数 :param stride: 步长 :return: ''' block_list=[] #先计算要不要加downsample downsample=None if(stride!=1 or self.inplane!=plane*block.extention): downsample=nn.Sequential( nn.Conv2d(self.inplane,plane*block.extention,stride=stride,kernel_size=1,bias=False), nn.BatchNorm2d(plane*block.extention) ) # Conv Block输入和输出的维度(通道数和size)是不一样的,所以不能连续串联,他的作用是改变网络的维度 # Identity Block 输入维度和输出(通道数和size)相同,可以直接串联,用于加深网络 #Conv_block conv_block=block(self.inplane,plane,stride=stride,downsample=downsample) block_list.append(conv_block) self.inplane=plane*block.extention #Identity Block for i in range(1,block_num): block_list.append(block(self.inplane,plane,stride=1)) return nn.Sequential(*block_list) resnet=ResNet(Bottleneck,[3,4,6,3],1000) x=torch.randn(64,3,224,224) X=resnet(x) print(X.shape) 输出结果 torch.Size([64, 1000])首先我们需要了解ResNet的原理和ResNet50的构造,如果参考我所上传的资料,完全可以搞懂。 这段代码是这个结构的复现。 这是ResNet最核心的地方: ResNet 总体结构 这段代码实现了 这段代码实现了 这段代码实现了 make_layer downsample是残差是否进行卷积的标识。 downsample=None #残差进行卷积的条件 if(stride!=1 or self.inplane!=plane*block.extention): downsample=nn.Sequential( nn.Conv2d(self.inplane,plane*block.extention,stride=stride,kernel_size=1,bias=False), nn.BatchNorm2d(plane*block.extention) )Conv Block输入和输出的维度(通道数和size)是不一样的,所以不能连续串联,他的作用是改变网络的维度 conv_block=block(self.inplane,plane,stride=stride,downsample=downsample)
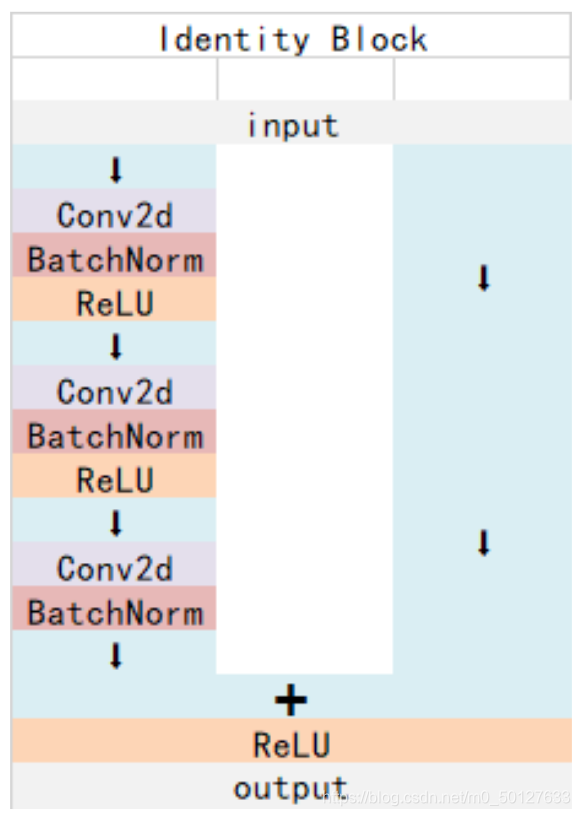
Identity Block 输入维度和输出(通道数和size)相同,可以直接串联,用于加深网络 #Identity Block for i in range(1,block_num): block_list.append(block(self.inplane,plane,stride=1))
网络结构 |

 downsample是用来将残差数据和卷积数据的shape变的相同,可以直接进行相加操作。
downsample是用来将残差数据和卷积数据的shape变的相同,可以直接进行相加操作。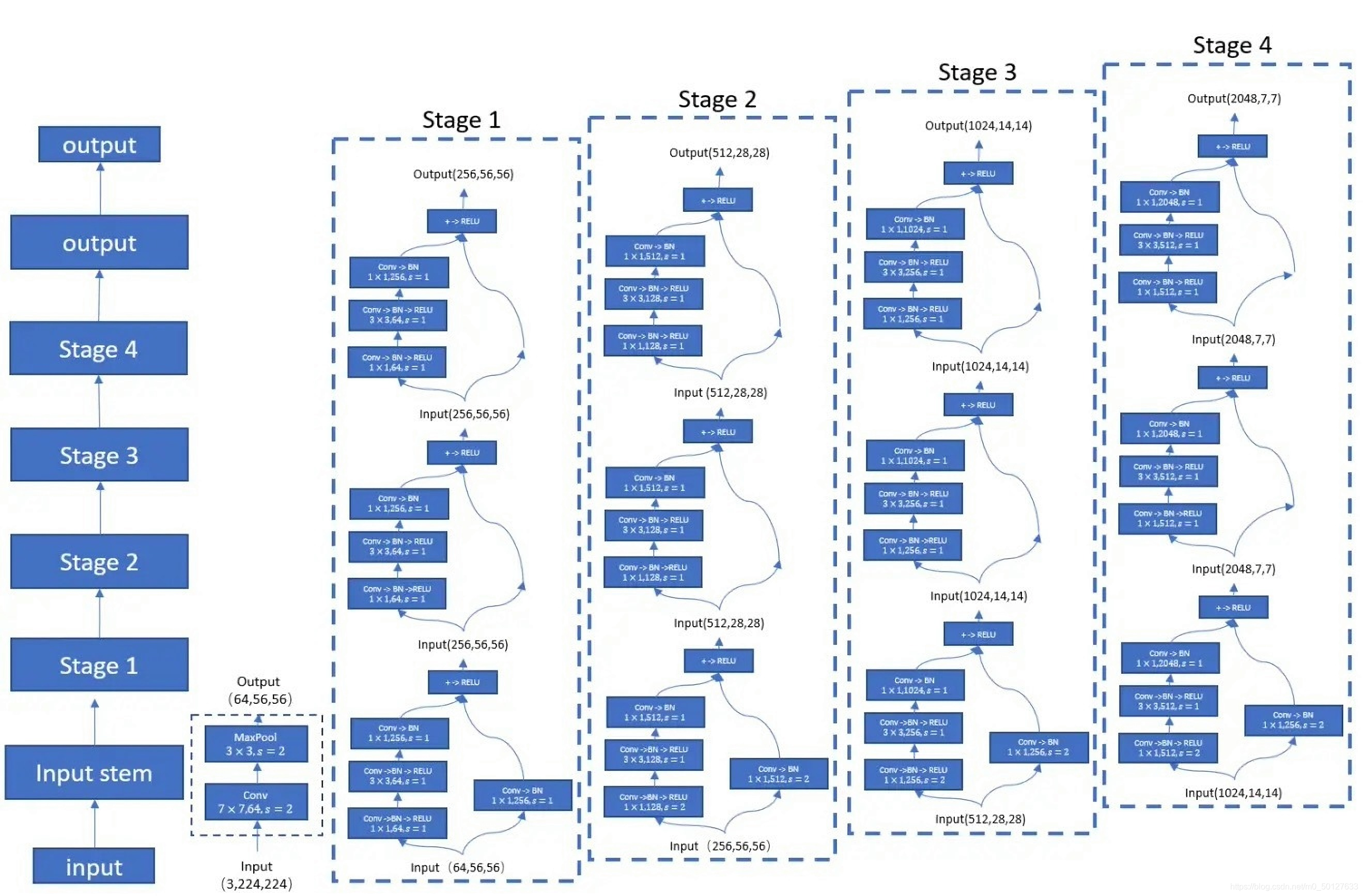



【本文地址】
今日新闻 |
推荐新闻 |